
EBench: Elemental Diagnosis of Generalist Mobile Manipulation Policies
arXiv, 2026
Preprint
View publicationHello! I’m Jiantong Chen, an AI engineer at the Embodied Intelligence Center of the Shanghai Artificial Intelligence Laboratory.
I build evaluation and learning systems for embodied intelligence, focusing on how robotic agents can be systematically measured, compared, and improved through scalable and reproducible frameworks. I view evaluation as a fundamental component of intelligence itself, where infrastructure is designed to reveal what embodied systems can perceive, reason about, and execute under diverse and open-ended conditions.
More broadly, I work on multimodal and agentic AI systems, spanning computer vision, large language models, and graph-based learning, with an emphasis on translating research ideas into deployable AI products.
Across domains ranging from robotic manipulation to real-world AI products, I focus on building AI that is not only intelligent in principle, but measurable, controllable, and deployable in practice.
2024.11 — Present
2022.11 — 2024.11
arXiv, 2026
CVPR 2024 Workshop, 2024
Knowledge-Based Systems, 2021
IEEE Transactions on Cybernetics, 2020
Remote Sensing, 2020
The following projects and information are selectively presented, with sensitive and confidential details appropriately redacted, and only partial work content disclosed.

A blink-based assistive calling system for ALS patients
An Indoor VLA Manipulation Benchmark Built on NVIDIA Isaac Sim
A unified evaluation framework that supports multiple embodied manipulation benchmarks.
The Vision-Language Manipulation in Open Tabletop Environments challenge.
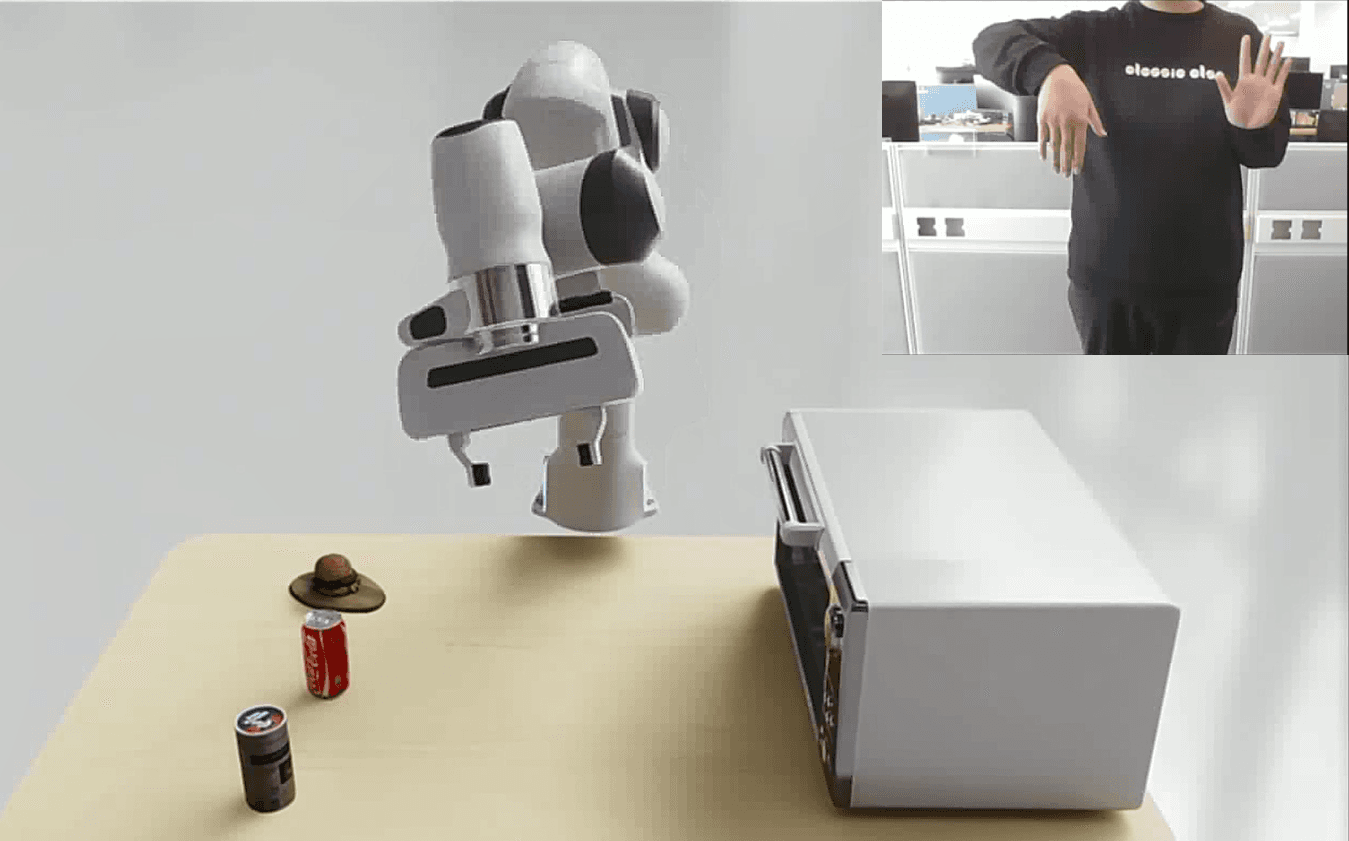
Real-time gesture-based teleoperation system for robotic arm control
A modular, multi-agent, cross-platform system for automated long-form fiction generation.
I don’t treat research and engineering as separate tracks.
In my experience, the most impactful AI systems emerge when research ideas are tightly coupled with engineering constraints, such as data availability, latency, scalability, and deployment environments.
So I tend to think in terms of system and business rather than papers or models alone.